計測こだわりメモ
計測とシステム提案の計測テクノ
計測の命題-誤差と遅れによる発振
カテゴリ:[はじめに_計測の考え方]
各ステップの誤差
計測管理は、実際には「対象」と「ユーザ」の間で1)計測、2)演算、3)制御の無限ループになります。それを図に表すと次のようになります。
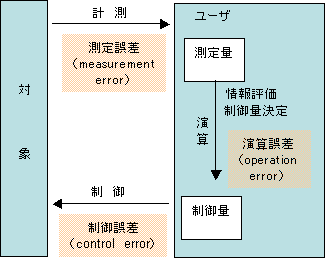
ところが、対象を制御しようとすると
- 計測結果を検出する際 ⇒ 計測誤差
- 制御量を演算する際 ⇒ 演算誤差
- 制御する際 ⇒ 制御誤差
というように、それぞれのステップにおいて「誤差」が発生します。
制御の遅れ
さらにそれぞれのステップは瞬時に行うことは物理的に不可能で、必ず時間的な「遅れ(タイムラグ)」も発生します。
すなわち
1)計測に要する時間による遅れ
2)演算結果を得るまでの時間による遅れ
3)制御を命じて実際に制御するまでの遅れ
が生じます。
結局、もし仮に「誤差を完璧に無くせた」としても、「現在の状況」ではなく「過去の状況」に基づいて制御を行い制御自身にも時間を要するため、
「現在との時間的ずれ」による誤差(エラー)が常に発生します。
発振について
これらの誤差と遅れが原因となって、「細かく正確に制御しよう」とすればするほど、かえって「発振」といった「制御不良」が起きることがしばしばあります。
ファジイ(あいまい)制御などが登場してきた背景には、この発振の抑制がありますが、要するに「厳密に制御しよう」とすればするほどかえって発振がひどくなるため、「自動車のハンドルの遊び」のようにある程度緩やかな部分も必要です。
目標値に近いときは緩やかに、目標値から遠いときは急速に制御する必要があるということです。